Additive manufacturing has drastically reduced the time it takes to fabricate unique parts, which is why it is frequently used for prototyping and low-volume production. However, it is not effectively utilized for modification or repair of existing parts. This proof-of-concept method uses a combination of scanning technology and 3D printing to scan a desired print area, determine the geometry to be printed, and print directly onto an existing surface.
The scanning is achieved using a laser profilometer to scan a real-world object, which is compared with an existing virtual representation of the object in CAD. In the example shown below, the final surface is a flat plane (i.e. filling the indentation in the part).

The real surface and the simulated surface are aligned using the Iterative Closest Point algorithm, which helps to calibrate the printer to the real-world surface. This ensures that the generated solid to print is created at the correct coordinates relative to the printer.
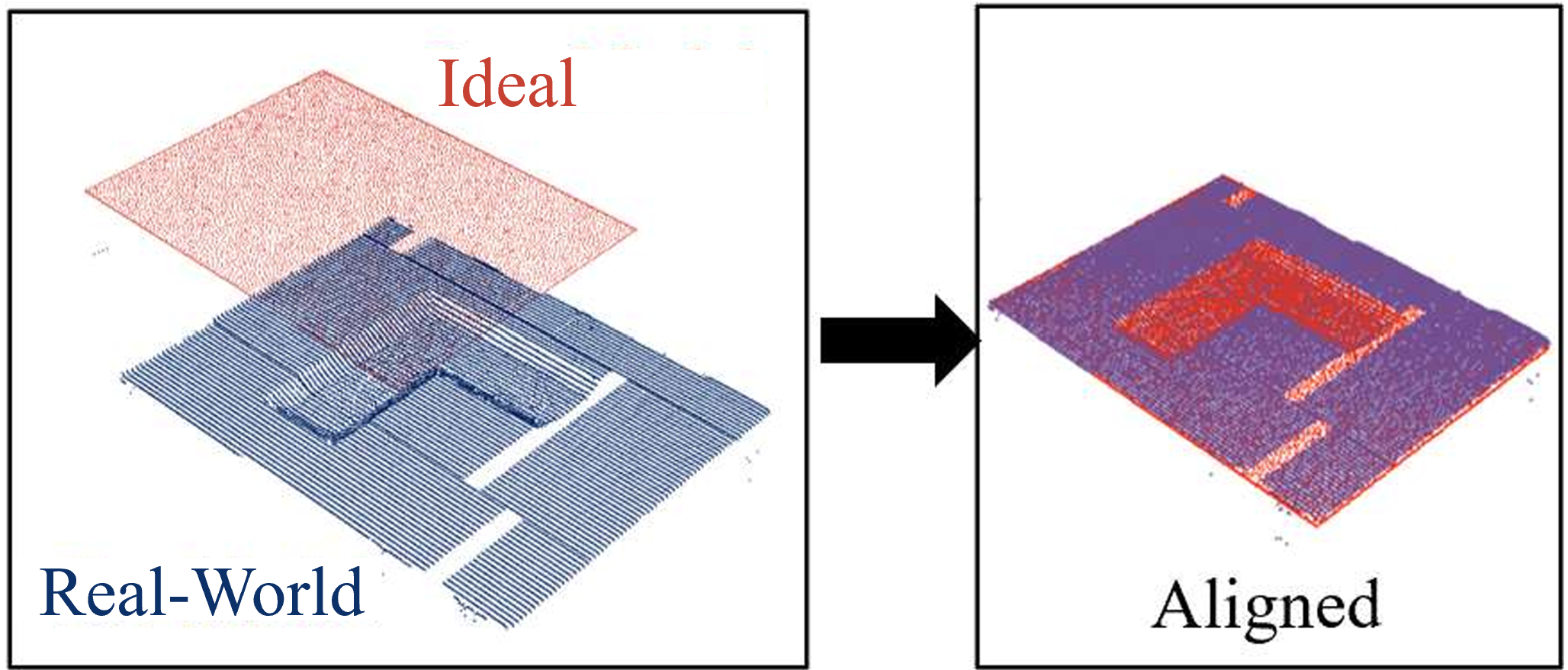 The ideal and the real-world surface are subtracted from each other to determine any discrepancies between the real model and the simulated model. These differences in the models determine the print volume, which is converted to print paths. The paths are printed using a custom 5-axis Fused Filament Fabrication printer onto the real surface.
The ideal and the real-world surface are subtracted from each other to determine any discrepancies between the real model and the simulated model. These differences in the models determine the print volume, which is converted to print paths. The paths are printed using a custom 5-axis Fused Filament Fabrication printer onto the real surface.
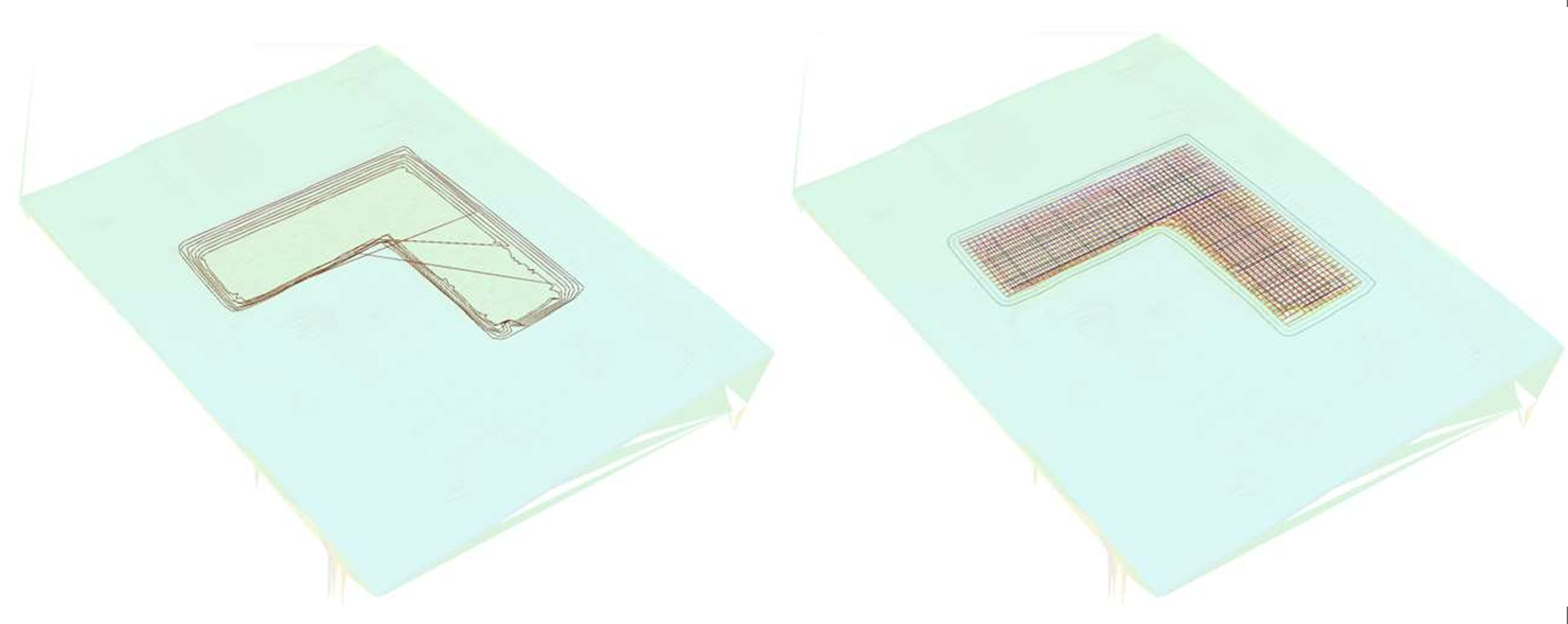
Finally, the calculated print path is printed onto the real-world surface, modifying it to match the ideal surface! This could be expanded upon in the future and combined with other aspects of our multi-axis planning such as quadric slicing or concavity planning to allow for more complex modifications.

For more information: https://doi.org/10.1115/IMECE2024-144176
Primary Researcher:
Sam Elliott, Master's Student Exp. Graduation June 2025
elliosam@oregonstate.edu
www.linkedin.com/in/sam-a-elliott
Advisor:
Dr. Matt Campbell
matt.campbell@oregonstate.edu
We’re looking for collaborators and sponsors who want to shape the next generation of additive manufacturing system.